Picture of the Day – November 2nd

Some of our crew on the science operations EVA this morning




Some of our crew on the science operations EVA this morning
Mars 160 selection process
The Mars 160 mission does not include only the simulation but of course the preparation on the different levels. It started 2 years ago when Mars Society made a call for volunteers for the Mars Arctic 365 mission. In the fall of 2014 out of 200 people 20 volunteers were chosen. They separated into 3 crews and had to pass 2 weeks rotation at Mars Desert Research Station. Each crew member proposed their own science, engineering or outreach project and went through several psychological tests. I was in the crew 143, the only girl, the only Russian and the only one without any science or engineering background. The rest: engineers – Alexandre Mangeot (France), Ian Silversides (Canada), Claude-Michel Laroshe (Canada); geologist – Paul Knightly (USA); botanist – Paul Sokoloff (Canada). Even though we had so many differences, we lived as one multifunctional organism. The reason for such a smooth and productive work was one mutual goal – to perform as a crew at its maximum.
The Mars Society judges examined all those actions and after six months we got our most waited for email. Since then the life of crew Mars 160 started to evolve in an interesting curvy way. We had to rearrange crew members, because, unfortunately, some could not participate in the mission due to their personal reasons. We had to rethink the whole concept of the mission and came to an even better conclusion. Instead of doing one year simulation, which was already done by Institute of Biomedical Problems, HI-SEAS, etc. The Mars Society decided to do a unique twin-study in different locations but with the same crew and same research projects. The different terrain will cause different field science results. Maybe the desert and Arctic are much more similar than we think. In September of 2016 the crew started the first part of this 160 days experiment: Mars Desert 80 days. In June of 2017 the second part of the mission Mars Arctic 80 days will take place. The results of both simulations can vary a lot or be similar. Here is where the fun part start: data evaluation, conclusions, decisions! Months will pass. The Mars 160 Analogue mission will be finished but our remote science team will continue to surprise the world with new information based on the work we will have done.


Yusuke sampling lichens on our science operations eva

Some of our crew on the science operations EVA this morning

Shannon the PI supervising the experiment

Jon working with smartpots

Annalea sketching in the field

Anastasiya shadowing Jon on the eva
Today and the few days ahead are semi-sim days. Meaning we are breaking the full sim to get as much as interesting science, technological or interaction return.
This morning the EVA crew (Annalea, Anushree, Jon and Yusuke) investigated a location on time constraints schedule. Anastasiya and Shannon were on site to look over them and document how they performed with the spacesuit. Tomorrow, they will do the same except that the EVA crew will not carry the backpack nor the helmet. The comparison in science return will be probably interesting.
For a few days now, we have neighbors in the vicinity of the Hab. They are crews from Canadian, German and UK space agencies. They brought their fancy rovers to test procedures on the field. Right next to us! We could not let that opportunity go away. So we jump into our Habcar and pay a visit to them.


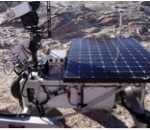
The UK team (#murfi) is testing operations with the PanCam that will be mounted on the ExoMars rover. Yes! We met the eyes of ExoMars! Basically, the remote team back in UK is in simulation trying to find out where is currently the rover, based only on the pictures that the stereoscopic cameras are sending, like they would do if the rover was on Mars. This was their Sol #0. While the crew on the field that we met were out of sim, to make sure that the robot is responding properly and eventually to intervene and do maintenance.






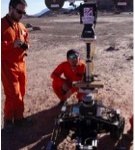

Further out, we met the Canadian rover. Much bigger and operated autonomously (not remotely controlled). It has also PanCam (#CamMars) on top of its mast. On the arm we saw the driller that will be used in the future by Mars rover to take rock sample to be sent back to Earth. But next to the arm is a microscope (Tammi) that blocked the arm during a trial test. So when we were there the rover was being debugged. A good opportunity to talk to the engineers…




Later this week we are looking forward to meet the German team.
Sol #34 Where am I? Mars?
What the heck? This desert has to be the best Mars analogue site in the world. For the first time, as far as I know, four international Mars analogue expeditions are working in the same area. Field crews of scientists and engineers from Canada, (the Canadian Space Agency), Germany (DLR) and the United Kingdom (U.K. Space Agency) are based here within ten km. of our Mars Desert Research Station. We drove past their yurts and robots on our way to a special science operations trial in a remote cliff alcove further north.
This morning, bright and sunny, our crew began an intensive four day study of a site specific simulated working environment in the field. Our geologist Jon, biologist Anushree, lichen generalist Yusuke, Shannon as research control and me as field artist all spent time in a previously unknown area, sampling lichens and investigating the geology. This was not a usual field science EVA but one that emphasized science operations. Our goal here was to try to understand how we work in simulation effectively, with the maximum science return within strict two hour time constraints. Anastasiya, as film maker documented us and we all took plenty of photos and notes, paying particular attention to processes in terms of techniques and tools.
This afternoon because this is a special Sim/no Sim day we exchanged visits with the UK space agency and the Canadian Space Agency. Yet to greet and meet the Germans!
Look to Alex’s report for more detail.
As we drove home, we passed the collections of tents next to the road, large and small rovers, flags of the world flying and everyone waving. Windy this morning, someone’s washing had already blown away.