Picture of the Day – November 14th





HUMAN EFFICIENCY ON MARS
Jon Clarke
Robotic missions of the surface of Mars have revealed much of the nature of the planet. Machines or extraordinary complexity has traversed more than 60 km of the surface. Add to this the achievements of robotic missions to the lunar surface and it is easy to see why many people have come to see this as both the norm and the ideal for planetary exploration.
Invaluable though these robotic missions have been to date, and no doubt will continue to be into the future, it is important not to lose sight of the fact that the most effective and efficient way to explore the surface of the Moon or Mars with by astronauts. In 2012 Dr. Ian Crawford of the University College London published an important comparison of the return from robotic and crewed exploration of the Moon and implications for Mars.
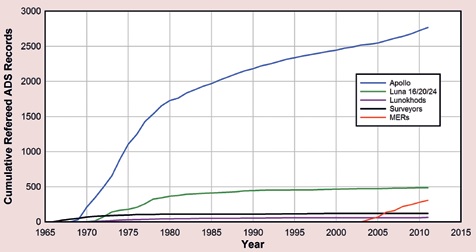
Cumulative number of publications for the Apollo, Luna 16/20/24, Lunokhod, Surveyor, and Mars Exploration Rover missions. From Crawford Figure 2 (2012).
The results of the Crawford paper are summarised by Figures 1 and 2. Figure 1 shows the cumulative number of papers published from Apollo compared with the important lunar and martian robotic missions. The graph shows not only have there been far more publications from Apollo by a factor of 10 to 100, Apollo missions continue to deliver new knowledge whereas publications from the robotic missions have levelled off.
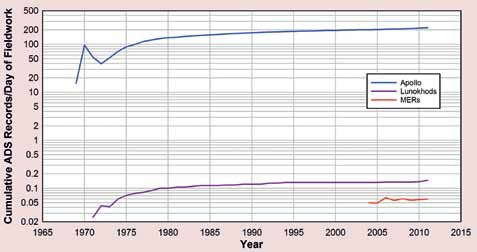
Number of publications per exploration day exploring the surface of the Moon or Mars by astronauts and robotic rovers. From Crawford Figure 3 (2012).
This productivity is even more remarkable when we consider that the Apollo crews spent only 3.4 days on the Moon, whereas robotic missions operated for weeks to months. Dividing the number of papers for the Apollo and lunar robotic rover missions gives scientific productivity per day, and is shown in Figure 2. Apollo missions were between 100 and 1000 times as productive as robotic rovers on this criterion.
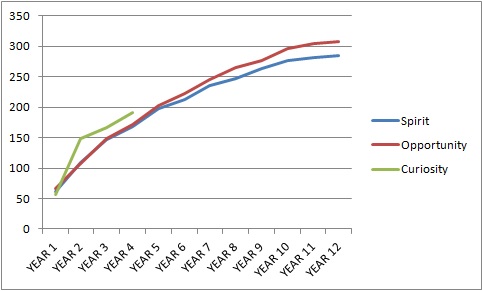
Cumulative number of publications for the Apollo Mars Exploration Rover missions and Curiosity rover mission in years.
In Figure 3 I have updated the publication data for the Mars Exploration rovers to January 2016. This figure also shows that cumulative publications for the Mars Exploration rover mission have also begun to level off, even before the end of the mission. Although the Curiosity mission has only been on Mars for a total of four years, it too is following the same trend. The productivity per day of the Mars Exploration rover missions is about one hundredth of that for Apollo over a comparable period (Figure 4).

Number of publications per exploration day for the Mars Exploration Rover and Curiosity rover missions.
From these data I conclude that, while robotic exploration has been, and will be valuable into the future, the real exploration of Mars will only begin once astronauts are working on the surface. Compared to Apollo astronauts, those on Mars will have far better tools and support and will be able to work even more effectively.
The full paper by Dr Ian Crawford can be read online in the journal Astronomy and Geophysics http://astrogeo.oxfordjournals.org/content/53/2/2.22.full.pdf+html
EVA Today: Challenges and Accomplishments
Another intense extra-vehicular activity!
Today, Annalea, Anastasia and I headed towards the field site at 9:17 in the morning. We decided to leave early considering the temperature outside. After gearing up, we went inside the EVA airlock and simulated depressurisation like always, and then egressed the hab. Our first task was to remove the two trash bags from hab. This EVA was basically focused on collecting hypolith abundance data by putting multiple quadrats and taking the sample back for macroscopic measurements of hypolith colonies. The first lesson learned is to always take a route map while heading for a field site. Today, although our sampling site was in the vicinity of MDRS, for the first 15 minutes we kept wondering about the most convenient way to reach to the ridge where we were supposed to put our hypolith quadrats. The ridge was approximately 1400 meters above from the sea level. Although we were trying to take a route which was most convenient and required more walking than climbing in spacesuits, to save energies for the field work itself, we ended up a shorter but difficult route. Personally, I had been to the location for an EVA previously for a different research objective but we decided not to proceed that way as it was easy but a long walk. Also, we did not have the exact route map to follow. Finally, we came to a conclusion and found our way towards the ridge. The way to reach there was shorter but absolutely tricky. We had to climb on the slippery mounds and a steep incline at the end of the ridge which, in the heavy space suit, was something to do. But we did it!
The two unexpected events happened. First, my helmet started fogging up because I was breathing fast while climbing and Anastasia found a fly (we were not alone J) inside her helmet which was very disturbing. So, we decided to stay for 10 minutes in the middle of the mound which was slippery so we adjusted our legs properly so that we do not fall down. Anastasia got rid of the fly and the fog inside my helmet started clearing up. The foggy helmet makes your excursion even more challenging and actually dangerous as you are not able to see through. So after resolving those issues we moved ahead and decided to slow down our pace which worked. During this period, we were constantly receiving transmissions from our HabCom – our Crew Geologist Dr Jon Clarke (a responsible job!). HabCom is the person who is based inside the hab, monitors the activities of the EVA team, and provides suggestions if needed via radio transmissions. This job rotates.
Finally, we reached to the sampling location. I felt that this was not the perfect site for putting the hypolith quadrats as quartz rocks were scarce and tiny in size. But I still wanted to record the hypolith abundance in this site because my ultimate objective is to cover as many places we can and in turn come up to a significant conclusion in terms of the abundance of our green friends. As we kept exploring the ridge we found a nice gravely extent to put quadrats on. And, to my excitement, we completed four quadrats and obtained significant hypolith abundance data after such difficult and exhausting ‘journey’ to the location. Moreover, I collected some soil sample for further analysis.
I was thinking why our work on recording hypolith abundance in the Utah Desert is important even though it is commonly practiced in deserts. Our work stands out because we are performing this study in full-simulation suit while carrying almost 18 kgs on our bodies. It is unprecedented and would provide a significant comparable data with other Martian analogs to understand the pattern and extent of colonization and environmental effect. Furthermore, we are testing challenges and limitations of conducting such studies in full simulation suit to obtain insights for the future human astrobiological exploration of Mars. Dr Chris McKay of NASA Ames Research Centre is the ‘Earth-based’ expert of the hypolith project. Telecommunication is a very important component of the science operations of MARS 160 mission. We have to have asynchronous communication with our ‘Earth-based’ scientists through for individual projects as sometimes protocols need to be modified according to the changing situations.
So, we finished our field work and headed back to the hab. Again, we were extremely careful while climbing down and were putting baby steps J Oh yeah, suddenly we felt that we were hungry! We started discussing the mashed potatoes (which was the menu of the lunch) on the radio. Funny!!

Figure 1. View captured on the way.

Figure 2. Climbing high.

Figure 3. Working.

Figure 4. Talk shop.
The colonies living under rock
The theory of relativity surrounds us. Sometimes we can encounter it at unusual places. The colonies of biological organism living at the rock – can be humans or hypoliths. Yes, we are a colony living on the big rock called Earth! We assumed we know who are the humans, but what are the hypoliths? Do we have more similarities than differences? Can I even compare them and us?
Hypoliths are a photosynthetic organisms that lives underneath translucent rocks in climatically extreme places, such as Arctic, Antarctic, Atacama, Namib deserts and here, just outside our station. Why underneath the rocks? Since hypolith is mostly dominated by cyanobacteria, this is the way for these organisms to survive even in extreme environment. We have cyanobacteria living in the sea, forests, mild terrain zones and why not inhabit also cold and hot deserts? Natural selection and adaptation transformed cyanobacteria into new type the “hypolith”, which won the race between other bacteria in surviving at those areas. They found the smart way of comfortable living – the shelter! Rock protects hypoliths from harsh ultraviolet radiation, wind and extreme temperatures. The rocks are generally translucent which allow hypoliths to receive light and moisture from the soil underside. Here is another similarity to us – the adaptation, which requires some level of intelligence. We are also in some way intelligent in surviving, but in another way dumb in slowly destroying the “rock” that protects us. Maybe those microorganisms can teach us a good lesson?!
How to find hypoliths? First, look for a gravel area. Second, find quartz in the gravel area. Third, turn over each quartz stone and check for green color beneath or in the cracks. If you see greenish colored patch, it is they – the breed of hypoliths.
Here at Mars Desert Research Station crew microbiologist Anushree Srivastava works on the hypolith research project. As I was assigned to be cross trained in science field research and laboratory work, I participated in many “hypolith EVA’s”. We choose the experimental site with the gravel, identify the quartz rocks and record the hypolith abundance data.
Why we are doing it here? Utah desert similar to Mars not only by its red color. Even though Mars is more hostile to life than where we live now, there is a big possibility to find microorganisms living underneath the Martian rocks. Hypoliths will help humans to understand how to investigate microbial responses to environmental stressors.
Without noticing, we have already taken the example from hypolith colonies of surviving in extreme places. One of the proposed idea for human colony on Mars is to live under the ground or cover the habitat with 5 meters of Martian soil, which will protect from radiation. Therefore, humans will live “underneath the rock” just like hypoliths do!

Anushree soil samples

Hypoliths Quadrats in the action

Hypoliths Quadrats

Preparing the solution for the plants

Super moon behind the fence out of reach

Towards the moon

Anushree and Anastasiya