



SSUIt project – 3rd Entry
October 30th and 31st, two EVAs were performed to test in the field, and for the first time, the SSUIt project. The good news is that the untested/unevaluated characteristic that I was worried about are not an issue after all. The bad news is that despite all my tests on the interface, there are bugs here and there that need to be corrected ASAP.
So let’s start with the bad news.
During the first EVA, the GPS ship did not track any satellite. I find out later in the Hab that the ship is probably out of service. So I used another one that worked well during the second EVA during which I wanted to tried the navigation system which unfornutally frozed. I had to hard reboot the system and doing so I lost my navigation data which was stored in a USB flash drive… left in the Hab. Bottom line, I could not tried the navigation system, and I still do not know why it frozed.
Now the good news.
Firstly the wristband does not disturb the field operations. The cap, that protects the screen, has a slight tendency to open by itself or due to the wind, but I will quickly resolve this detail with a little bit of sewing and some Velcro. The screen could be a little brighter but there is nothing I can do about it.

Secondly, the battery seems to hold the charge. I was concerned about the time I will be able to use the interface on the field because the Raspberry Pi, all the sensors and the screen can draw a fair amount of current. Around 1.5 amps, which is more than the fans. For my two first tests on the field, which lasted about 2 hours each, I had two batteries in the backpack while usually only one is used. I believe that the EVA can be expanded to 4 hours with two batteries or 2 hours with only one. The battery voltage before departure was 11.6V and the drop was around 2V at the end of the EVA.
Finally, the system was more stable than I would have though. All the Python daemons that record the sensors data and work in the background did not crash, the web browser that displays the interface did not crash either. This is very good news because any crash (like the navigation system) on the field would be very difficult to investigate the cause back in the Hab.
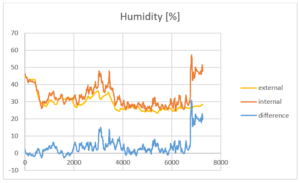
Anyway, despite the difficulties, I have recordings from few sensors. Several surprises. The temperature in the helmet is not excessively hotter than the outside. Roughtly the temperature difference is about 4°C and can reach 7°C. But when it is around 30°C outside, the inside is really hot. The system temperature can reach 50°C!

Regarding humidity, surprisingly, it is sometimes drier inside than outisde. Which is hard to explain at this point. The bump that occurred at around 7000 sec is due to the failure of the tape that supported the sensor that felt down close to my mouth.
During the second EVA, I had Yusuke’s tracker and the SSUIt GPS chip working. The comparison of the traces match. Yusuke’s tracker seems to have a lower float number resolution that makes the trace to “jump” from one position to another.

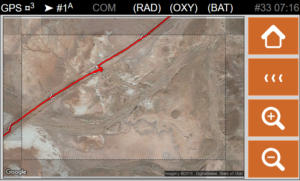
The SSUIt GPS track begins out of the Hab. After the navigation system froze I had to hard reboot the whole system. The plotted path is the one recorded after the reboot, therfore after leaving the Hab. The blue dots on the map correspond to the navigation waypoints intended to pass by. After the failure I decided to walk around, exploring the area North of the Hab then join the road and see if the track will match the road printed on the map. It turned out that the path and the road are superimposed very precisely.
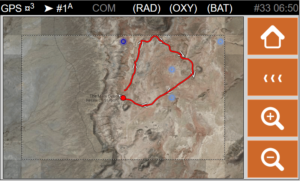
I can even see on which side of the road I was walking on. The little knot on the path correspond to something I found on the edge of the road: a puddle of water that was turning around due to the wind with a green ring of algue in it.

Report by Alexandre Mangeot