



Science Discussion – October 31st
WHERE DO EVAS COME FROM?
Jon Clarke and Annalea Beattie
The basic unit of exploration at MDRS is the EVA, or Extra-Vehicular Activity. This term comes from the earliest days of the US space program and was entirely appropriate for the occasions when astronauts first went outside their spacecraft. It has continued to be used for excursions on the lunar surface, marathon assembly activities on the International Space Station, and complex repairs to the Hubble Space Telescope. The first explorations on the surface of Mars will also be called EVAs, but as people progress further and further from their Mars stations, including multi-day excursions in pressurised exploration vehicles (PEV), a whole new terminology may need to be evolved. In the meantime we continue to use the established terms.
While EVAs both here and in space are well-documented, the processes by which EVA goals of exploration are determined are often unseen. One of my projects on the Mars 160 expedition is to work with Annalea Beattie here on the expedition, Bill Clancey of the Institute for Human and Machine Cognition, and others to explore this and other operational questions. It has been said that people who like sausages should not see them being made. Perhaps the same is true of EVAs! But let’s not be put off, but delve into the details of this process.

Astronaut Jack Schmitt on the Moon during Apollo 17 (NASA image)
Exploration EVAs, which have not occurred since the end of the Apollo 17 mission, are designed to answer specific questions and gather particular data. Sometimes the goal has been defined as “hypothesis testing”, a terminology based on the scientific philosophy of Karl Popper. For instance, this methodology has been extensively used to elect the landing sites for robotic Mars missions and to guide sol-by-sol operations, as described in Bill Clancey’s 2012 book “Working on Mars”. Likewise, the Apollo 15 mission validated the hypothesis that the lunar highlands were made of the rock anorthosite. Less well known is that the Apollo 16 mission falsified the hypotheses that the Descartes highlands were volcanic. Does this mean that Apollo 16 was a failure? Not at all! Not only did it show that the photo-mapping assumptions were false and needed to be upgraded, much valuable data was collected as to what was actually there. Failure is as instructive in science as success.
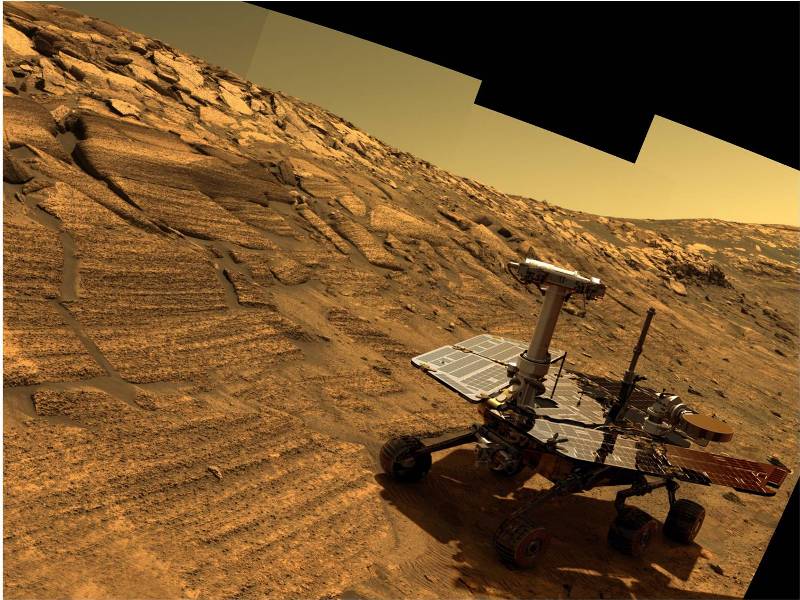
Opportunity Mars rover superimposed out outcrop at Endeavour crater (NASA/JPL image)
In my experience the idea for a geological field excursion or a simulated EVA often does not come from an abstract desire to test hypotheses, but from a perception that an area is interesting. This based on past experience is simply that an area is unknown and needs to be explored and what is actually there documented. Hypotheses are generated further down the track, as the existing data is reviewed prior to the excursion or EVA, or even as a result of a previous EVA. These can be tested in the field or on data collected in the field. Because of the speed at which direct human explorers can cover ground and assess sites, often multiple objectives can be met on a single excursion of EVA.
All of these approaches have their place on the M160 expedition. One recent EVA was driven by the need to test hypotheses that particular small mesas were inverted channels. Other small mesas were already known to be inverted channels but were visited to collect palaeocurrent data. During the course of the EVA several new hypolith localities were discovered for detailed characterisation at a later date. At this stage our understanding of hypoliths in the MDRS area is so poor that we have no hypotheses to test. Instead we must find the occurrences and then document them. From these data we will generate hypotheses for further testing by later crews and to compare our findings here with those in the Arctic during the second phase of our mission.

Sampling gypsum for halophiles
Another EVA, part of an excursion away from the station in an analogue “PEV”, was to a well-understood exposure of the Summerville Formation, a bedded gypsum rich deposit. Our goal was to sample the gypsum for laboratory analysis for preserved halophytic microorganisms trapped during the deposition of the gypsum on a Jurassic mud flat, or during fluid movement deep underground. We serendipitously found a new hypolith location for future study on the same EVA. A second EVA from the PEV tested hypotheses that a different lichen assemblage to that growing on rocks would be found on woody debris round the tall shrubs occurring at this locality. We appear to have falsified this hypothesis but found new and well developed lichen sites associated with moist sandstone boulders shaded by cliffs.

Looking for lichens on woody debris
On Mars most EVAs are likely to be based on objectives proposed by a large and Earth-based mission support team. The astronauts performing the EVAs will not be fully independent agents, but representatives of a much larger organisation and community. But nor will they be robots, mindlessly acting the commands of a remote mission control. Nor can they be as tightly controlled as the astronauts were on the Apollo missions. Even here human ingenuity circumvented the strictures of mission control, a shown by the story of the “seatbelt basalt” on Apollo 15. Dave Scott spotted an unusual rock along the way back to the LM. Judging that they would not be given permission to make an unscheduled stop for the sole purpose of sampling he instead stopped to “fix a seatbelt.” The sample “coincidentally” ended up inside the Scott’s pocket. With the greater time lag on a crewed Mars mission will require much higher autonomy, a lesson that may be difficult for mission managers to learn. As they gain more local tacit knowledge they will want greater autonomy from mission control.

The unexpected – finding Jurassic mammal burrows
As on a real future crewed Mars mission, many of our EVAs are generated by people not actually present on site. External researchers, part of our larger team, have requirements regarding documenting and sampling hypoliths and lichens that we have to meet. These must be integrated in our schedule of 4-5 EVAs per week. Their perceptions, understanding, and expectations of the area must be balanced against our own increasing knowledge of our environment. How this process of negotiation and integration to ensure that all goals are met actually works on a mission such as ours is also part of our study. Through documenting, understanding, and eventually publishing these processes we will improve the knowledge base that will guide the planning of future EVAs on the Moon, Mars and beyond.